|
|
|
|
Development of the Internet of Robotic Things for Smart and Sustainable Health Care
Gabriel Gregory James 1![]()
![]() ,
Michael Nseobong Archibong 1
,
Michael Nseobong Archibong 1![]()
![]() ,
F. E. Onuodu 3
,
F. E. Onuodu 3![]()
![]() , Etimbuk Emmanuel Abraham 4
, Etimbuk Emmanuel Abraham 4![]()
![]() , Peace C. Okafor 5
, Peace C. Okafor 5![]()
![]() , Ufford
Victor Ufford 6
, Ufford
Victor Ufford 6![]()
![]()
1 Lecturer,
Department of Mathematics and Computer Sciences, Ritman University, Mkpatak, Nigeria
2 Lecturer, Department of Computing, Topfaith
University, Mkpatak, Nigeria
3 Lecturer, Department of Computer Science, University of Port Harcourt,
Nigeria
4 Lecturer, Department of Electrical Electronics Engineering, Topfaith University Mkpatak,
Nigeria
5 Officer, Department of State Service, Bayelsa State Command, Bayelsa,
Nigeria
6 M.Sc. (Ed.) Candidate, Department of Computer and Robotics Education,
University of Uyo, Uyo,
Nigeria
|
|
|
ABSTRACT |
|
|
There has been
an alarming increase in sick patients in rural and remote areas. This is a
result of non-operational healthcare infrastructure and the unavailability of
doctors. Several elderlies in Nigeria are plagued with major health issues
such as hearing loss, neck pain, and cataracts. This is due to the lack of a
robust information system for visualized activity guidance for sick patients
in rural areas. To solve this problem, there is a need for an enhanced
Internet of Robotic Things model for data analysis and interpretation of
health-related issues which is highly indispensable. The study presented an
optimized approach to the application of the Internet of Robotic Things and data
analytics in the health sector. The Internet of Robotic Things (IoRT) is an emerging vision that brings together
pervasive sensors and objects with robotic and autonomous systems. In this
work, an enhanced Internet of Robotic Things (IoRT)
model for the health activity of patients in rural areas was developed using
Object-oriented system design methodology (OOSDM). The new system was
optimized with neuro-fuzzy technique and implemented with JAVA, XAMPP,
Hypertext Pre-processor (PHP) programming language, Bootstrap, JavaScript,
Cascading Style Sheet (CSS), and MySQL for medical-related datasets storage.
The results obtained showed that parameters for both systems were used to
evaluate their performance in the number of analyzed data, the number of
identified health issues, the number of robots integrated into the system,
the number of authentication techniques for registered users of the system
and the number of adopted machine-learning technique. The new system
surpassed the existing in all the evaluated parameters and adopted a total
number of 100 records which enabled it to identify 3 health issues. The
identified and addressed issues were loss of hearing, cataracts, and neck
pain. The new system also integrated only a robot for patient interaction.
The new system utilized the username and password technique and the
iris-based technique for user authentication. In addition, the new system
could be beneficial to sick patients with life-threatening issues, to medical
experts, and researchers with a keen interest in the study area. |
|||
|
Received 20 July 2024 Accepted 01 August 2024 Published 13 August 2024 Corresponding Author Gabriel
Gregory James, g.james@topfaith.edu.ng DOI 10.29121/ShodhAI.v1.i1.2024.3 Funding: The project
was funded through individual author contributions amidst the biting economic
situation of Nigeria. Copyright: © 2024 The
Author(s). This work is licensed under a Creative Commons
Attribution 4.0 International License. With the
license CC-BY, authors retain the copyright, allowing anyone to download,
reuse, re-print, modify, distribute, and/or copy their contribution. The work
must be properly attributed to its author.
|
|||
|
Keywords: Data Analytics, Health Issues, IoRT,
Robotics |
|||
1. INTRODUCTION
The study presented an enhanced approach to utilizing data analytics and the Internet of Robotic Things (IoRT) in the healthcare industry. IoRT is a new concept that integrates robotic and autonomous systems with ubiquitous sensors and objects. The present study investigated the ways in which the amalgamation of robotic and Internet of Things (IoT) technologies can augment the functionalities of extant IoT and robotic systems, thereby permitting the creation of novel, potentially revolutionary services Simoen et al. (2018)
Up until now, the robotics and Internet of Things (IoT) sectors have pursued disparate but very complementary goals. Whereas the robotics group seeks to generate action, interaction, and autonomous behavior, the IoT community concentrates on offering information services for ubiquitous sensing, tracking, and monitoring. As a result, there is a growing argument that merging these two domains into the Internet of Robotic Things (IoRT) will result in a substantial increase in value. Early signs of this convergence of IoT and robotics can be seen in concepts like ubiquitous robotics and cloud robotics, which transfer resource-intensive activities to the server side, as well as distributed, heterogeneous robot control paradigms like network robot systems or robot ecologies Chen et al. (2016)
In order to explain a notion where sensor data from multiple sources is combined, processed using both local and distributed intelligence, and then utilized to control and manage items in the physical world, overseas researchers originally came up with the phrase "Internet of Robotic Things" (IoRT). From the cyber-physical standpoint of IoRT, IoT-derived sensor and data analytics technologies improve robot situational awareness and task performance. Use cases include companion robots and intelligent transportation. Subsequent discussions on IoRT in the literature have taken on diverse stances, such as the "robot-aided IoT" perspective, which sees robots acting as extra sensors, and the one that stresses strong team communication James et al. (2023).
The idea of data analytics was also investigated in the study. The creation and deployment of technology intended to deliver the appropriate information to the appropriate user at the appropriate moment from the rapidly growing volumes of data in our society is referred to as "big data" Onu et al. (2015). The difficulty is not only in keeping up with the exponentially increasing amounts of data, but also in managing the increasingly sophisticated, varied, and interconnected data types.
The goal of the project is to create a better Internet of Robotic Things (IoRT) model for tracking patients' health-related behaviors in remote locations. Reviewing the applications of current IoRT-based systems, designing a new data analytics system to address patients' health issues in rural areas, optimizing the new system's performance using a neuro-fuzzy technique, implementing the new system using MySQL and the Java programming language, and assessing the performance of the new and existing systems using standard evaluation metrics are the specific goals.
1.1. RELATED WORKS
The idea of the Internet of Robotic Things (IoRT) was first put forth by Simoen et al. (2018) after a thorough analysis of its benefits and uses. The study came to the conclusion that, although a truly holistic approach is now lacking, it is necessary and identified some significant technological obstacles. The study also found that integrating the two technology areas into nine different system abilities enhanced value. Robotics has been used to use the advantages of IoT, such as distributed perception and machine-to-machine (M2M) protocols. However, the main application of robotics in IoT has been for active sensing tactics James et al. (2023). The majority of current IoRT implementations are found in particular application domains including Industry 4.0, precision agriculture, and ambient assisted living (AAL). Robot integration into IoT middleware systems is one example of a domain-neutral solution that is only starting to take shape.
Age-friendly virtual assistive technologies and their effects on the day-to-day lives of caregivers and dependent persons were reviewed by Hannah & Julie (2016). The study brought together content from the domains of gerontology, gerontechnology, human-computer interface (HCI), and disability in a novel way. Despite their excellent work, the authors were unable to turn the review into a model that would have offered more insight and clarity Chinagolum et al. (2020).
A review on the use of healthcare robots in the home for elderly individuals was done by Hayley et al. (2014) . The purpose of the study was to determine prospective robotic solutions as well as the demands of older persons. It examined particular robotic solutions and indicated opportunities for further research and improvement. The authors also looked at research on the variables that affect nursing home care admittance as well as related technology advancements. Nevertheless, in spite of their best attempts, the study's conclusions could not be implemented in the actual world for health robots.
Hayley et al. (2014) conducted a review on the role of healthcare robots for older people at home. The study aimed to identify the needs of older adults and potential robotic solutions. It highlighted areas for future development and analyzed specific robotic solutions. Additionally, the authors reviewed literature on factors influencing admission to nursing home care and corresponding technological solutions. However, despite their best efforts, the study's findings could not be applied to real-world health robotics implementations.
An agent-based architecture for adaptive supervision and management of smart environments was investigated by Stefano et al. (2015). The study covered in detail the architecture and operation of a generic agent that is in charge of environment management in the context of ambient intelligence. This agent automates environment management, guarantees proper Internet connectivity, and provides customized support for user actions. It also learns from the user's behavior over time and adjusts to suit their individual needs. The design was put into practice in a multi-agent system that included several kinds of agents with various degrees of learning and reasoning capacity. The authors performed excellent work, but when analyzing their technique, they found that they had merely simulated the implementation and had not actually deployed it in a genuine smart setting.
A study on an agent-based architecture for creating activity-aware systems to help the elderly was presented by Juan et al. (2010). The authors suggested an approach to activity-aware computing that allows smart environments to keep track of ongoing activities and provide prompt help to older persons in their current activities. This new paradigm required the creation of innovative tools to assist developers in simulating human activity in the digital realm and in adapting intelligent settings according to user behavior. Despite their excellent effort, the authors were unable to extend the produced system to additional software engineering jobs that require topic models for text analysis.
A study on a sophisticated robotic in-home system for elderly people receiving home care was suggested by Pekka et al. (2011). The study focused on the usability and safety profile of an advanced robotic equipment and telecare system designed to help senior home-care patients with their medication adherence. The authors made a commendable job, but even though they tracked instances of missing dosages in real time, their model did not offer a way to deal with this problem.
A study on an adaptive intelligent alarm system for wireless sensor networks was presented by Ayman et al. (2015) . The study suggested a straightforward yet flexible remote system for home automation that uses dependable sensor nodes that can be controlled or monitored to monitor and regulate temperature, humidity, gas, motion, and light. This invention offered a fascinating chance to improve device connectivity for automation in the house. Despite the authors' excellent work, the results were a little unclear because simulation was used instead of real hardware sensor devices.
Debajyoti et al. (2018) focused on how senior customers used smart home services. The Elderly Smart Home Technology Acceptance Model is a new, complete research model that the study introduced and tested. It builds upon the original technology acceptance model to explain why older people want to utilize smart home technology. Although the authors' effort was admirable, their methodological analysis showed that they had not actually deployed the model in a genuine smart home context; instead, they had just simulated the implementation.
A study on the architecture modeling and formal analysis of intelligent multi-agent systems was proposed by Ashalatha et al. (2012). According to the study, most contemporary cyber-physical systems have some degree of autonomy James et al. (2016). In order to assist senior citizens with their everyday activities, systems like Ambient Assisted Living frequently need to carry out safety-critical tasks including fall detection, health deviation monitoring, and caregiver communication. Although the authors performed excellent work, the choice of datasets that were not a combination of supervised and unsupervised learning approaches caused latencies in their model's performance.
2. METHODOLOGY
To organize, schedule, and oversee the processes involved in creating new systems or improving current ones, a variety of system approaches are available Ituma et al. (2020), Chinagolum et al. (2020), Daniel et al. (2018). These approaches include a collection of guidelines, procedures, and practices intended to facilitate the efficient and quick development of systems. The research employed the Object-Oriented System Development Methodology (OOSDM) James et al. (2023), Onu et al. (2015), James et al. (2017), Chinagolum et al. (2020). This methodology is centered on treating the suggested system as a group of interconnected classes and objects for the purposes of modeling and implementation. OOSDM was selected due to its rapid development capabilities, efficacy, efficiency, dependability, and reusability Ituma et al. (2020), Chinagolum et al. (2020).
Furthermore, a technical methodology known as the Object-Oriented System Development Methodology (OOSDM) extends the concepts of object-oriented programming to the analysis and design of systems, businesses, or applications James et al. (2023), Umoh et al. (2012), James et al. (2012), James et al. (2012), James et al. (2022). Throughout the software development process, it also makes use of visual modeling to improve stakeholder communication and guarantee product quality James et al. (2017), James et al. (2023), Okafor et al. (2023), James et al. (2024).
In addition, the Object-Oriented System Development Methodology (OOSDM) for the study involved the following phases:
1) Analysis,
2) Design,
3) Implementation and
4) Testing
2.1. ANALYSIS OF THE EXISTING SYSTEM
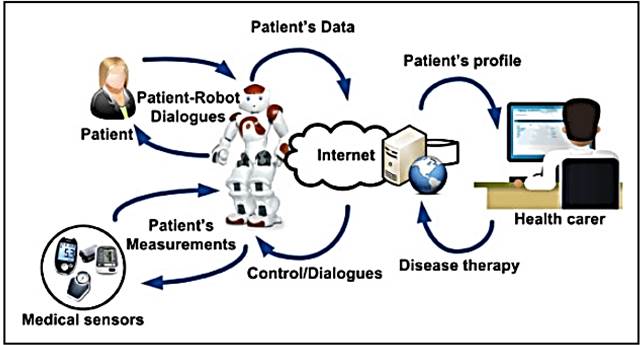
As further shown in Figure 1, the current system is an Internet of Robotic Things (IoRT) paradigm put forth by Simoen et al. (2018), Ekong et al. (2024), James et al. (2024). This IoRT-based model reads glucose sensors and sends the data to caregivers. It is intended for use in the healthcare industry as a master Bluetooth device. After that, the robot speaks verbally to the patient, updating them on their diet, insulin bolus or consumption, and other pertinent details. Through the reading of glucose sensor data and the delivery of caregiver feedback, the model improves telemonitoring of diabetic patients by utilizing IoT technologies for remote engagement, notably in the healthcare domain. By analyzing the effects of their actions, comprehending their surroundings, and drawing conclusions from past experiences, cognitive robots provide value to this system. Previous sections explored deliberation, social intelligence, and multimodal perception as examples of cognition. The study focused on reasoning and learning-related cognitive tasks in an IoRT multi-actor setting. Furthermore, knowledge models—which are essential components of cognitive architectures—were added in the current system. Ontologies are a popular method for organizing knowledge in robotics and the Internet of Things. Prominent instances of ontologies that depict the interaction between an agent and its tangible surroundings encompass the IEEE Ontologies for Robotics and Automation (ORA) and the Semantic Sensor Network. James et al. (2024), James et al. (2024), Anietie et al. (2024). For example, the current system model makes use of the ORA ontology to provide spatial reasoning between two robots that must cooperate in order to provide a human with a missing tool. Cloud technology is being used in recent research to extract knowledge from a variety of multi-modal data sources, including natural language, raw sensor data observations, and human demonstrations. It also offers a virtual environment for modeling strategies for robot control. Essien et al. (2024), Ekong et al. (2024).
Figure 1
|
Figure 1 Architecture of the Existing
System Source Simoen et al. (2018) |
2.1.1. DETAILED ANALYSIS OF THE EXISTING SYSTEM
The following are components of the existing system:
1) Patient: This element indicates the person who will be receiving healthcare services from healthcare experts. Most frequently, the patient is unwell or hurt and needs care from a doctor, nurse, psychologist, dentist, veterinarian, or other health care professional.
2) Robot: This element depicts a machine, particularly one that can be programmed by a computer and is capable of automatically performing a complicated set of tasks. Robots can be controlled internally or externally by the use of a control mechanism.
3) Internet: Using interconnected networks and defined communication protocols, this component depicts a large-scale computer network that offers a range of information and communication services.
4) Health Carer: This element symbolizes a person who renders healthcare services, such as taking blood pressure readings and administering first aid. Making house visits to elderly people, those with a history of illness, people who are pregnant or breastfeeding, and people who are at high risk of illness.
2.1.2. ALGORITHM OF THE EXISTING SYSTEM
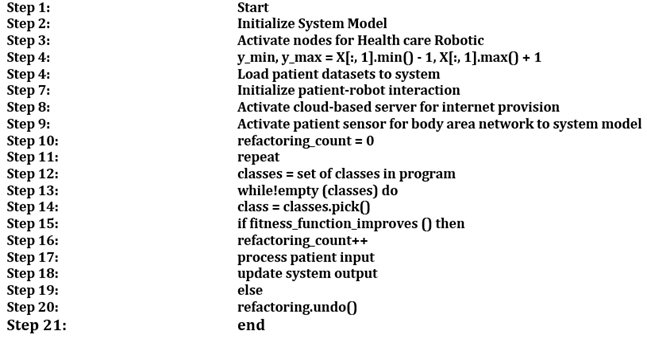
Figure 2 shows the existing system algorithm.
Figure 2
|
Figure 2 Algorithm of the Existing
System Source Simoen et al. (2018) |
2.2. DESIGN OF THE NEW SYSTEM
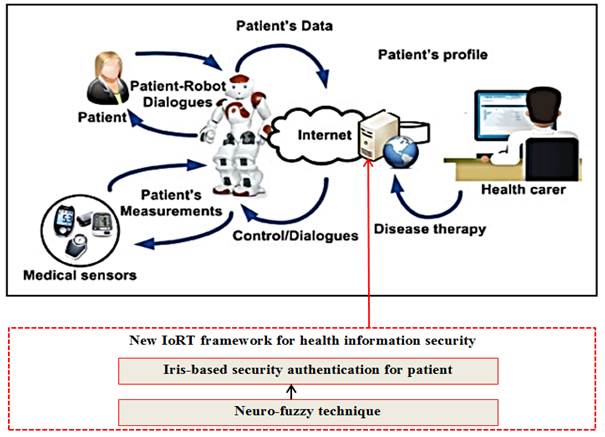
The new system is an improved version of the existing system as illustrated in Figure 3. The added improvement encompassed a secured framework for health information sharing. The added framework provides health information security to end-users of the system (i.e. patients in rural areas) and further minimizes information leakage Okafor et al. (2024). The technology behind the new system is the neuro-fuzzy technique. The technique is a hybrid of artificial neural networks and fuzzy logic. A customized multilayer feed-forward neural network is how it is described. By merging the learning capacity and connectionist architecture of neural networks with the human-like reasoning of fuzzy systems, neuro-fuzzy hybridization creates a hybrid intelligent system. In the literature, this method is frequently referred to as a neuro-fuzzy system (NFS) or a fuzzy neural network (FNN). In this respect, fuzzy sets and a language model made up of a collection of IF-THEN fuzzy rules are employed to combine the human-like reasoning of fuzzy systems into neuro-fuzzy systems—more often used here.
Figure 3
|
Figure 3 Architectural Design of the New
System |
2.2.1. DETAILED ANALYSIS OF THE NEW SYSTEM
1) Iris-based security authentication for patients: This element is referred to by the acronym IRIS, which stands for internal rotational inspection system. It serves as a defense against widespread health information leaking. The following subdivision uses an ultrasonic method to test pipes and tubes without causing any damage. As the data is shown and collected, the IRIS probe is carefully removed from the water-filled tube. The ultrasonic beam can be used to identify metal loss on the tube wall's inside and outside.
2) The Neuro-Fuzzy Technique: One way to think of the neuro-fuzzy system is as a three-layer feed-forward neural network. The input variables are represented by the first layer in this model, fuzzy rules are represented by the middle (hidden) layer, and output variables are represented by the third layer. (Fuzzy) connection weights are used to encode fuzzy sets. Applying a learning method does not necessarily necessitate representing a fuzzy system in this way, but it can be useful since it shows the data flow for input processing and learning inside the model.
An n-dimensional (unknown) function that is partially specified by the training data is approximated by the neuro-fuzzy system. The system's encoded fuzzy rules are imprecise samples that can be thought of as training data prototypes. It is not appropriate to think of a neuro-fuzzy system as a particular kind of (fuzzy) expert system, nor is it closely associated with fuzzy logic. Although neural networks and fuzzy systems are not the same, they can be used to solve issues (such pattern recognition, regression, or density estimation) in situations where there isn't a mathematical model available.
Algorithm 2: Artificial neural network algorithm of the New System
Procedure: Training and learning of the New System
Input: Training sets
Output: Learned model
1) Initialize input and output layers of neural networks for training models
2) Input for neuro-fuzzy system = 0
3) Increment input for neuro-fuzzy system
4) Input = input + 1
5) Access the learning rate of model weight
6) Win+1 = win + n(yi – y1)xi
7) Test the learning rate of the neuro-fuzzy system
8) Transfer the learned model to the output layer of neural networks
9) End
Total number of datasets (training & test sets inclusive) = 200
Percentage used for training (%) = 70
Percentage used for testing (%) = 30
Source of Data: GitHub repository for health datasets. Table 1 shows the result of the trained system
Table 1
|
Table 1 Result
of the Trained System |
||
|
Data
input (increasing
columns) |
Number
of program iterations |
Accuracy
(%) |
|
5 |
1 |
71 |
|
8 |
1 |
78 |
|
9 |
1 |
67 |
|
10 |
1 |
80 |
|
11 |
1 |
75 |
|
12 |
1 |
71 |
|
13 |
1 |
65 |
|
14 |
1 |
65 |
|
15 |
1 |
60 |
|
16 |
1 |
75 |
|
17 |
1 |
70 |
|
18 |
1 |
65 |
|
Source
python program |
||
Algorithm 3: Fuzzy logic algorithm of the New System
Procedure: Fuzzification and Defuzzification of the New System
Input: Crisp sets
Output: Defuzzified health information of the patient
1) Initialize fuzzy system for patient
2) Load crisp sets to the repository of the robotics
3) Fuzzify loaded crisp sets with a knowledge base
4) x0 x1 x2
5) x = [[1., 0., 0.],
6) [1., 0., 1.],
7) [1., 1., 0.],
8) [1., 1., 1.]]y
9) Write fuzzified crisp sets as Output
10) End
Algorithm 4: Hybridized algorithm of the New System
Procedure: Optimal performance of the IoRT for healthcare activities
Input: Test-sets
Output: Secured health information for patients in rural areas
1) Start
2) Initialize System Model
3) Activate nodes for Health care Robotic
4) y_min, y_max = X[:, 1].min() - 1, X[:, 1].max() + 1
5) Load patient datasets to the system
6) Initialize patient-robot interaction
7) Activate a cloud-based server for internet provision
8) Activate patient sensor for body area network to system model
9) Initialize Neuro-fuzzy system
10) Read loaded crisp input with neural networks
11) Defuzzify crisp input
12) Assign membership function
13) fuzzify + Proceed
14) refactoring_count = 0
15) repeat
16) classes = set of classes in the program
17) while!empty (classes) do
18) class = classes.pick()
19) if fitness_function_improves () then
20) refactoring_count++
21) process patient input
22) update system output
23) else
24) refactoring.undo()
25) end
2.2.2. DATASETS
To maximize the speed and thoroughness with which crucial information may be retrieved, analyzed, and used, this part explains the methods for gathering all the data necessary for training and testing the new system.
2.2.2.1. TRAINING SETS
During the new system's learning process, the training set was adopted. The training dataset is also examined by a supervised learning algorithm to identify, or learn, the best combinations of variables that will result in an effective predictive model. To create a trained (fitting) model that generalizes effectively to new, untested data is the aim of the training process. The accuracy of the fitted model in classifying fresh data is assessed using "new" samples from the held-out datasets (validation and test datasets).
2.2.2.2. TRAINING SETS
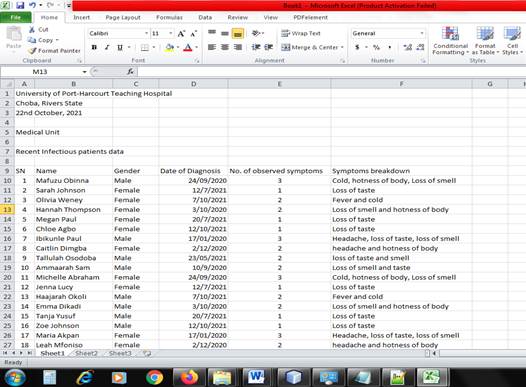
The test set, which is distinct from the training dataset but has the same probability distribution as the training dataset Figure 4, was obtained from distributed Github online surveys on healthcare activities in rural Nigeria. Upon matching the training set, the new system succeeds in the test. A training dataset that fits the model better than the test dataset is another sign of overfitting. Furthermore, just the test set is used to assess the performance of the new system.
Percentage of data used for training (%) = 70
Percentage of data used for testing (%) = 30
Figure 4
|
Figure 4 The Training Datasets |
3. EXPERIMENTAL RESULTS
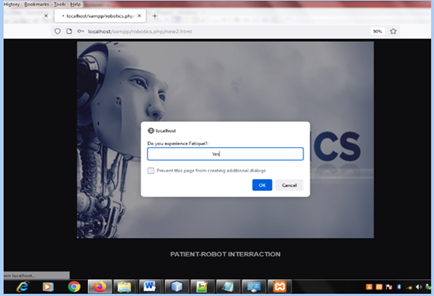
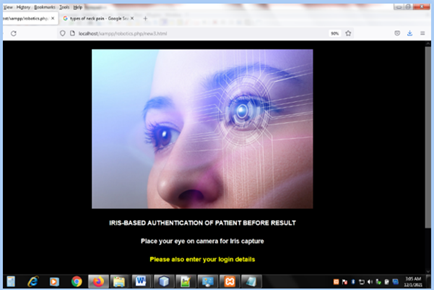
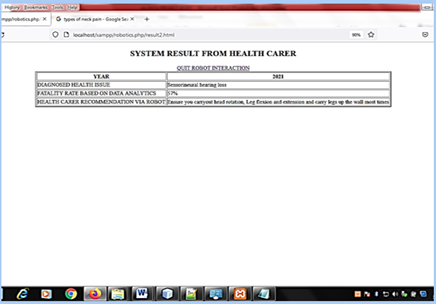
The program starts with the Netbeans IDE (Integrated Development Environment) startup for Java Application program codes. This is illustrated in Figure 5. The IDE enables Java applications to be developed through a series of program components known as modules. Figure 6 shows the splash page of the new system. The splash page consists of different navigation links such as the new user registration link and the system options link. Figure 7 shows the new user registration page in which the end-user inputs vital information for registering with the system. The essence of the registration process is for the user to be allocated a unique username and corresponding password. Figure 8 shows the system options page. The system options page shows the various healthcare services offered by the programmed robot of the system. The system options encompass hearing loss, cataracts, and neck pain. Figure 9 shows the login page for registered users. The login page enables the registered user to input the system-allocated username and corresponding password. Once authentication is successful, the user is navigated to the patient-robot interaction page which is shown in Figure 10 After interaction with the programmed robot of the system, the user is navigated to the confirmation page before the health carer’s advice on the diagnosed health issue. This is illustrated in Figure 11. Figure 12 shows the result from the health carer. The result from the health care is based on the integration of the programmed robot, the health care, and the neuro-fuzzy technique.
Figure 5
|
Figure 5 Netbeans IDE 8.2RC Startup Environment |
Figure 6

|
Figure 6 Splash Page of the New System |
Figure 7
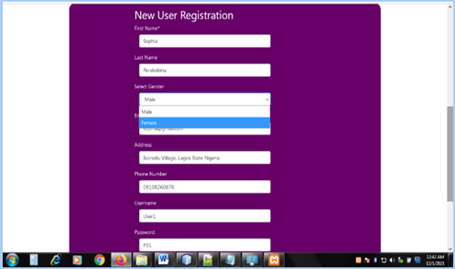
|
Figure 7 Registration Page |
Figure
8
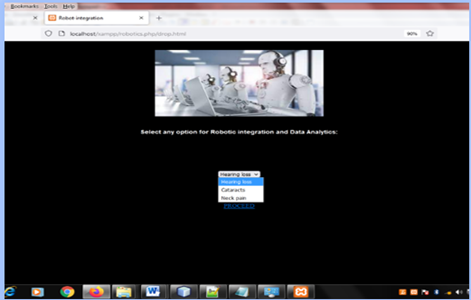
|
Figure 8 System Options Page |
Figure 9
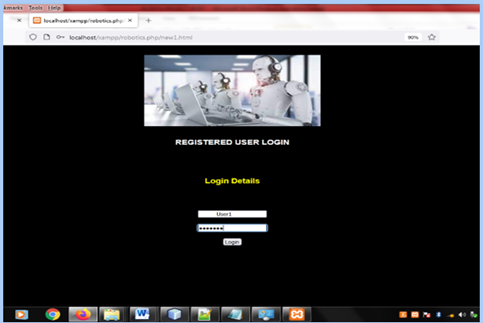
|
Figure 9 Login Page for Registered Users |
Figure 10
|
Figure 10 Patient-Robot Interaction Page |
Figure 11
|
Figure 11 Iris-Based Authentication of the
Patient Before the Result |
Figure 12
|
Figure 12 System Results from Health
Carer |
3.1. SUB HEADING 2
This section discusses the results and performance evaluation of the existing and new systems. The discussed results were further illustrated with charts and tables.
Table 2
|
Table 2 Result of the Existing System
|
||
|
S/N. |
Evaluated
parameters |
Values |
|
1 |
No.
of analyzed data |
45 |
|
2 |
No.
of identified issues |
2 |
|
3 |
No.
of robots |
1 |
|
4 |
No.
of authentication techniques |
1 |
|
5 |
No.
of adopted machine learning techniques. |
1 |
|
Source Simoen et al. (2018) |
||
Table 3
|
Table 3 Result of the New System |
||
|
S/N. |
Evaluated
parameters |
Values |
|
1 |
No.
of analyzed data |
100 |
|
2 |
No.
of identified issues |
3 |
|
3 |
No.
of robots |
1 |
|
4 |
No.
of authentication techniques |
2 |
|
5 |
No.
of adopted machine learning techniques. |
2 |
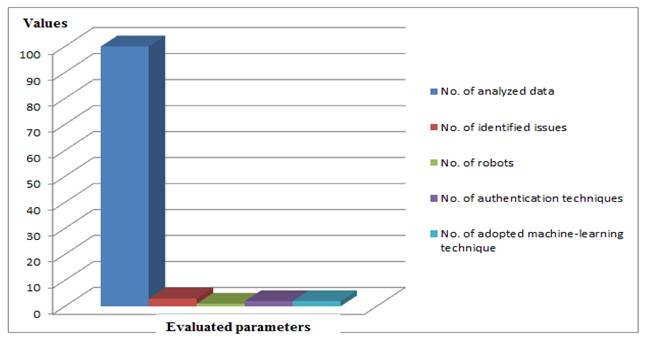
Figure 13
|
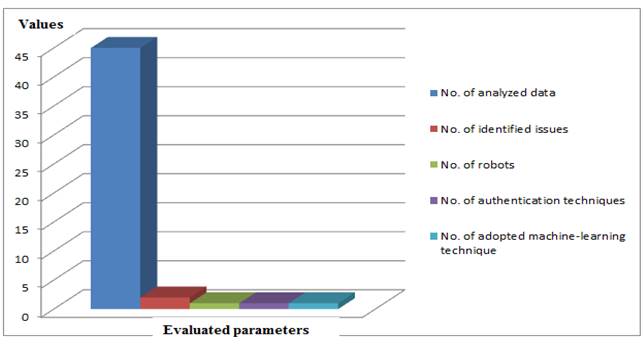
Figure 13 Existing System
Result Chart |
Figure 14
|
Figure 14 New System
Result Chart |
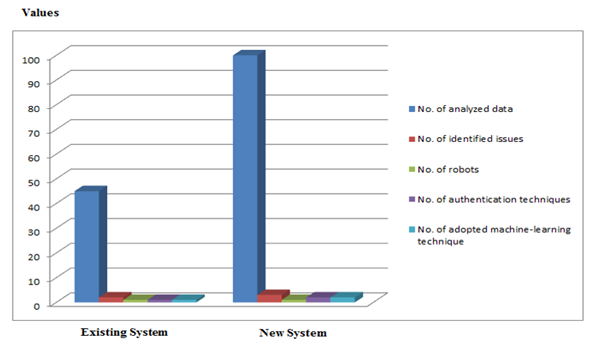
Table 4
|
Table 4 Comparative Analysis of the Existing and New Systems |
|||
|
S/N |
Parameters
for comparison |
VALUES |
|
|
|
|
Existing
System |
New
System |
|
1 |
No. of analyzed data |
45 |
100 |
|
2 |
No. of identified issues |
2 |
3 |
|
3 |
No. of robots |
1 |
1 |
|
4 |
No. of authentication techniques |
1 |
2 |
|
5 |
No. of adopted machine learning techniques. |
1 |
2 |
Figure 15
|
Figure 15 Comparative
Analysis Chart of the Existing and New Systems |
4. DISCUSSION OF RESULTS
The result obtained from the new system showed that it is an improved version of the existing system. Table 2 shows the result of the existing system. Parameters for the existing result were used to evaluate its performance. The mentioned parameters encompassed the number of analyzed data, the number of identified health issues, the number of robots integrated into the system, the number of authentication techniques for registered users of the system, and the number of adopted machine-learning techniques. The number of analyzed data in the existing system result included details of the registered user as well as inputted symptoms in the patient-robot interaction. A total number of 45 records were analyzed by the existing system. The existing system was only able to identify 2 health issues which involved dietary and blood glucose problems. The existing system also integrated only a robot for patient interaction. It also utilized the username and password technique for user authentication and further adopted cloud computing as its only implemented machine-learning technique. Table 3 shows the result of the new system. Parameters for the new result were used to evaluate its performance. The mentioned parameters encompassed the number of analyzed data, the number of identified health issues, the number of robots integrated into the system, the amount of machine learning algorithms used, and the number of authentication methods for system users who have registered. The new system adopted 100 records in all, allowing it to recognize 3 health concerns. Hearing loss, cataracts, and neck aches were the problems that were diagnosed and dealt with. The only patient engagement component of the new system was a robot. The new system used iris-based user authentication in addition to username and password user authentication. The iris-based recognition methodology is an automated biometric identification method that analyzes video footage of one or both of an individual's irises to identify complex patterns that are distinct, stable, and visible from a distance. The amount of entropy that biometric technologies can encode and employ for matching determines their discriminating abilities. In this respect, iris recognition is unusual since it allows for the avoidance of "collisions" (False Matches) even when cross-comparing large populations. Image capture from distances larger than a meter or two, or without cooperation, can be quite challenging, and this is its main constraint. Retinal scanning, a distinct ocular-based biometric technology that distinguishes between individuals based on the distinctive patterns on their retinal blood vessels, is frequently mistaken for iris recognition. The video camera is used for iris recognition. Technology to capture pictures of the complicated, finely detailed structures of the iris that are visible from the outside. An individual or a fraudster can be identified using digital templates that mathematical and statistical algorithms have encoded from these patterns. The new system employed the neuro-fuzzy machine learning method, a mix of artificial neural networks and fuzzy logic. Based on the previously discussed and assessed parameters, Table 3 displayed a comparison of the present and new systems. The related chart was used to further highlight each outcome from both systems.
5. CONCLUSION
In this work, we developed an enhanced Internet of Robotic Things (IoRT) model for the health activity of patients in rural areas. The new system is an improved version of the existing system. The added improvement encompassed a secured framework for health information sharing. The added framework provides health information security to end-users of the system (i.e. patients in rural areas) and further minimizes information leakage. The technology behind the new system is the neuro-fuzzy technique. The technique is a hybrid of artificial neural networks and fuzzy logic. It is represented as a special multilayer feed-forward neural network.
CONFLICT OF INTERESTS
None.
ACKNOWLEDGMENTS
We thank the Most High God for the gift of wisdom and life which enabled us succeed in this project. We used this medium to appreciate the management of Topfaith University for the enabling environment that drives research and innovation. Most appreciate most sincerely Dr. Nnanake-Abasi Offiong, the Chairman of Research and Innovation Committee (RIC) Topfaith University for his advice.
REFERENCES
Anietie,
E., Immaculata, A., Gabriel, J., & Unyime, E. (2024). Effective
Classification of Diabetes Mellitus
Using Support Vector
Machine Algorithm, Res. J. Sci. Technol., 4(2), 18-34.
Ashalatha, K., Simin C., Raluca M., & Cristina, S. (2012). Architecture Modeling and Formal Analysis of Intelligent Multi-Agent Systems, An Article published by Malardalen University, Vasteras Sweden.
Ayman, S., Osamah, K., & Ghaida, A. (2015). An Adaptive Intelligent Alarm System for Wireless Sensor Network, Indonesian Journal of Electrical Engineering and Computer Science, 15(7), 142-147. https://doi.org/10.11591/ijeecs.v15.i1.pp142-147
Chen, H., Markus O., & Illoh
H. (2016). Applications of Fuzzy
Logic in Data Mining Process. In Z. H. Bai Y., Advanced Fuzzy
Logic Technologies in Industrial Applications. Advances in Industrial Control. Springer: London, 2016.
Chinagolum, I., Iwok,
S. O., & James, G. G. (2020). A Model of
Intelligent Packet Switching
in Wireless Communication Networks. International Journal of Scientific &
Engineering Research, 11(1).
Chinagolum, I., Iwok, S. O., & James, G. G. (2020). Implementation of an Optimized
Packet Switching Parameters in Wireless Communication Networks.
International Journal of Scientific & Engineering Research,
11(1).
Daniel, S., Fabian, L., & Ingo, T. (2018). Agent-Based M and S of Individual
Elderly Care Decision-Making,
Proceedings of the 2018 Winter Simulation Conference.
Debajyoti, P., Suree F., Vajirasak V., & Borworn P. (2018). Analyzing the Elderly Users' Adoption of Smart-Home Services, IEEE Access.
Ekong, A. P., James, G. G., & Ohaeri, I. (2024). Oil and Gas Pipeline Leakage Detection using IoT and Deep Learning Algorithm, 6(1). https://doi.org/10.51519/journalisi.v6i1.652
Ekong, A., James, G., Ekpe, G., Edet, A., & Dominic, E. (2024). A Model for the Classification of Bladder State Based on Bayesian Network, 5(2).
Essien, N. P., James, G. G., & Ufford, V. U. (2024). Technological Impact Assessment of Blockchain Technology on the Synergism of Decentralized Exchange and Pooled Trading Platform, Int. J. Contemp. Afr. Res. Netw. Publ. Contemp. Afr. Res. Netw. CARN, 2(1), 152-165. https://doi.org/10.5281/zenodo.12103430
Hannah, M., & Julie, S. (2016). A Review of Age-Friendly Virtual Assistive Technologies and their Effect on Daily Living for Carers and Dependent Adults, HealthCare, 7(49). https://doi.org/10.3390/healthcare7010049
Hayley, R., Bruce, M., & Elizabeth, B. (2014). The Role of Healthcare Robots for Older People at Home: A Review. International Journal of Soc. Robotics, 6(575 -591). https://doi.org/10.1007/s12369-014-0242-2
Ituma, C., James, G. G., Onu, F. U. (2020). Implementation of Intelligent Document Retrieval Model Using Neuro-Fuzzy Technology. International Journal of Engineering Applied Sciences and Technology, 4(10), 65-74. https://doi.org/10.33564/IJEAST.2020.v04i10.013
James, G. G., Chukwu, E. G.,
& Ekwe, P. O. (2023).
Design of an Intelligent Based System for the Diagnosis of Lung Cancer, Int. J. Innov. Sci. Res. Technol.,
8(6), 791-796.
James, G. G., Ekanem, G. J., Okon, E. A., & Ben, O. M. (2012). The Design of e-Cash Transfer System for Modern Bank Using Generic Algorithm. International Journal of Science and Technology Research, Int. J. Sci. Technol. Res., 9(1).
James, G. G., Ekpo, W. F., Chukwu, E. G., Michael, N. A., & Ebong, O. A, Okafor, P. C. (2024). Optimizing Business Intelligence System Using Big Data and Machine Learning. J. Inf. Syst. Inform., 6(1). https://doi.org/10.51519/journalisi.v6i2.631
James, G. G., Okafor, P. C., Chukwu, E. G., Michael, N. A., & Ebong, O. A. (2024). Predictions of Criminal Tendency Through Facial Expression Using Convolutional Neural Network," J. Inf. Syst. Inform., 6(1). https://doi.org/10.51519/journalisi.v6i1.635
James, G. G., Okpako, A. E., & Agwu, C. O. (2023). Tention to use IoT Technology on Agricultural Processes in Nigeria Based on Modified UTAUT Model: Perspectives of Nigerians' farmers," Sci. Afr., 21(3), 199-214. https://doi.org/10.4314/sa.v21i3.16
James, G. G., Okpako, A. E., Ituma, C., & Asuquo, J. E. (2022). Development of Hybrid Intelligent based Information Retrieval Technique, Int. J. Comput. Appl., 184(34), 1-13. https://doi.org/10.5120/ijca2022922401
James, G. G., Ukpe, K. C.,
& Udosen, P. E. (2016). The Impact of ICT on Research and Development. Paper Presented at
the iSTEAMS Multidisciplinary
Cross-Border Conference.
James, G. G., Umoh, U. A., Inyang, U. G., & Ben, O. M. (2012). File Allocation in a Distributed Processing Environment using Gabriel's Allocation Models," Int. J. Eng. Tech. Math., 5(1&2).
James, G., Ekong, A., & Odikwa, H. (2024). Intelligent Model for the Early Detection of Breast Cancer Using Fine Needle Aspiration of Breast Mass. Int. J. Res. Innov. Appl. Sci., IX(III), 348-359. https://doi.org/10.51584/IJRIAS.2024.90332
James, G.G., Okpako, A.E., & Ndunagu, J.N. (2017). Fuzzy Cluster Means Algorithm for the Diagnosis of Confusable Disease, 23(1).
Juan, P., Marcela, R., Monica, T., Diana, S., Angel, A., & Adan E., (2010). An Agent-Based Architecture for Developing Activity Aware Systems for Assisting the Elderly. Journal of Universal Computer Science, 16(12).
Okafor, P. C., Ituma, C, & James, G. G. (2023). Implementation of a Radio Frequency Identification (RFID) Based Cashless Vending Machine, Int. J. Comput. Appl. Technol. Res., 12(8), 90-98. https://doi.org/10.7753/IJCATR1208.1013
Okafor, P. C., James, G. G., & Ituma, C. (2024). Design of an Intelligent Radio Frequency Identification (RFID) Based Cashless Vending Machine for Sales of Drinks. British Journal of Computer, Networking and Information Technology 7(3), 36-57. https://doi.org/10.52589/BJCNIT-WMNI1D4O
Onu, F. U., Osisikankwu, P. U., Madubuike, C. E., & James G. G. (2015). Impacts of Object-Oriented Programming on Web Application Development. International Journal of Computer Applications Technology and Research, 4(9), 706-710. https://doi.org/10.7753/IJCATR0409.1011
Pekka, R., Timo, P., Saija, L., Marja, A., & Alan, L. (2011). An In-home Advanced Robotic System to manage Elderly Home-Care Patients' Medications: A Pilot Safety and Usability Study Clinical Therapeutics, 39(5).
Simoen, P., Mauro, D., & Alessandro, S. (2018). The Internet of Robotic Things: A Review of Concept, Added Value and Applications. International Journal of Advanced Robotic Systems, 1(11). https://doi.org/10.1177/1729881418759424
Stefano, F., Berardina C., Paziemza E., & Domenico R. (2015). An Agent Architecture for Adaptive Supervision and Control of Smart Environments,
Umoh, U. A., Umoh, A. A., James, G. G., Oton, U. U., Udoudo, J. J. (2012). Design of Pattern Recognition System for the Diagnosis of Gonorrhea Disease. International Journal of Scientific & Technology Research, 74-79.
|
|
 This work is licensed under a: Creative Commons Attribution 4.0 International License
This work is licensed under a: Creative Commons Attribution 4.0 International License
© ShodhAI 2024. All Rights Reserved.


